국방품질연구회(DQS)가 전하는 품질 인사이트
DQS 매거진
무인기 비행안전성 확보를 위한 신개념 공중충돌회피 표준 동향 연구
2024. 06. 27
글. 국방기술품질원 감항인증연구센터 이종운 연구원

서론
공중에서 충돌로 인한 항공 사고는 그 피해가 매우 크다. 이러한 충돌을 방지하기 위한 항공안전법이 제정되어 있으며, 국가 공역에서 운행하는 모든 비행기는 반드시 준수해야 한다. 이는 무인기(원격조종 항공기 포함)도 예외는 아니다. 특히, 항공안전법 166, 167조는 항공기 간의 공중충돌을 방지하고자 다른 항공기를 회피할 것을 요구하는 조항들이다. 유인기의 경우 ATC(Air Traffic Contorl) 관제에 의한 회피, ACAS(Airborne Collision Avoidance System)의 TA(Traffic Advisory)와 RA(Resolution Advisory)에 의한 경고와 회피, 조종사의 육안 확인과 같은 여러 단계의 충돌 회피 방법이 존재하지만, 원격 조종 무인기의 경우 조종사가 탑승하지 않고 ACAS 장비가 없어 이러한 조항들을 준수하려면 대안이 필요하다. 따라서 공역에서 무인기를 운영하기 위해선 Detect and Avoid(DAA) 시스템과 같은 탐지 및 회피 전략이 필요하다. 미국에선 센서와 가이드 기술을 활용한 무인기의 DAA 시스템으로 모든 트래픽을 탐지하고 회피할 수 있는 장비를 개발 중이다. 탐지 대상은 현재 유인기에 사용 중인 공중 충돌방지 장비(ACAS, ADS-B)을 따르는 협조적 항공기와 그렇지 않은 비협조적 항공기 모두를 포함한다.[1] 본 기고에서는 최근에 공개된 원격 조종 무인기용 DAA 시스템의 국제적 표준인 ACAS-Xu(Airborne Collision Avoidance System-Xu)에 대해 설명하였다.
ACAS이란
우선 본격적인 DAA 시스템을 살펴보기 전에 기존의 공중충돌회피 장비에 대해 간략히 알아보고자 한다. ACAS(Airborne Collision Avoidance System)는 근거리 공중 충돌을 식별하고 조종사에게 충돌을 방지할 수 있는 가이드를 제공한다. 항공기 관제를 담당하는 ATC(Air Traffic Control) 서비스가 없거나 제한된 지역에서 충돌 회피 보호 기능을 제공한다. ATC 서비스에 대한 백업 기능을 제공하며, 지상시스템과 독립적인 최후의 수단으로 사용된다. 또한 항공운송사업에 사용되는 모든 비행기와 최대이륙중량이 5,700kg을 초과하거나 승객 19명을 초과하여 수송할 수 있는 터빈엔진 항공기는 의무적으로 장착하고 있다.
ACAS 원리
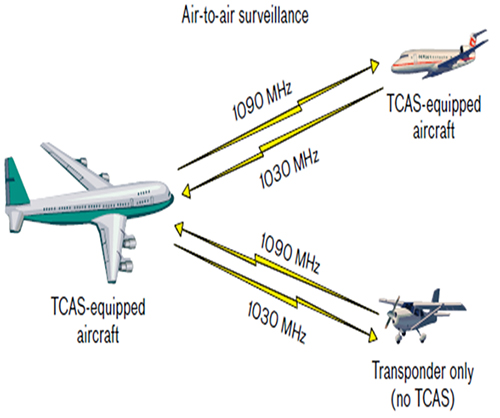
ACAS의 원리는 항공기에 장착된 트랜스폰더를 통해 1,030MHz 대역의 질문을 전송하면 1,090MHz 대역의 응답을 통해 다른 항공기의 위치, 속도 등을 수집한다.
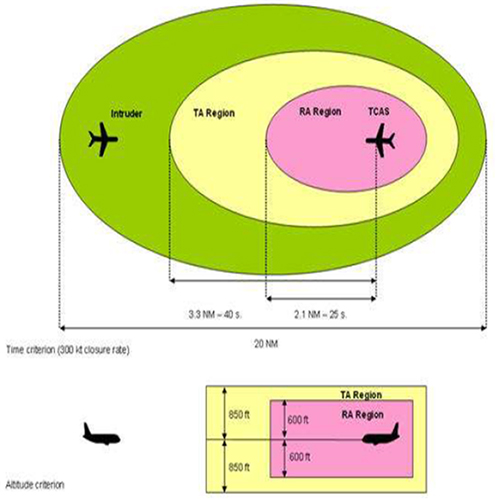
이러한 정보를 바탕으로 항공기 간의 최고근접지점(CPA, Closest Point of Approach)에 도달하는 시간과 고도차이를 예측한다. 여기서 최고근접지점은 두 항공기 간의 최소 경사범위(경사거리)이다. 즉, 최고근접지점은 양쪽 항공기 사이의 가장 작은 범위(거리)가 된다. ACAS는 최고근접지점에 근접하여 한계점을 위반하는 시간을 기준으로 교통조언(TA, Traffic Advisory)과 회피조언(RA, Resolution Advisiory)을 화면상에 시현하고 스피커를 통한 청각 방식으로 고지한다. 교통조언(TA)은 최고근접지점까지 20~48초 밖에 남지 않았을 때 발령되어 침입 항공기의 존재를 알려 충돌을 회피하도록 한다. 회피조언(RA)은 최고근접지점까지 15~35초 밖에 남지 않았을 때 발령되며 조종사에게 회피를 할 수 있는 기동을 알려주는 경보이다. 참고로 ACAS와 TCAS(Traffic alert and Collision Avoidance System)는 대동소이한 용어이다. ACAS는 기술표준이나 개념을 지칭할 때 사용하며, TCAS는 기술표준이나 개념이 현실에서 구현된 것을 지칭할 때 사용한다.
ACAS 개발 경과
ACASⅠ은 소형 항공기에 상황 인식 및 교통조언을 제공하지만 회피조언은 제공하지 않는 저비용 시스템이다. ACASⅡ는 수직 방향으로 교통조언과 회피조언을 제공하며 대형 여객기를 위한 시스템이다. ACASⅢ는 더 복잡한 지향성 안테나 시스템의 수평 거리 측정을 기반으로 수평 방향으로의 회피조언을 추가할 것으로 예상되었지만 지향성 안테나의 정확도 한계로 개발이 중단되었다.[2]
ACAS-X이란
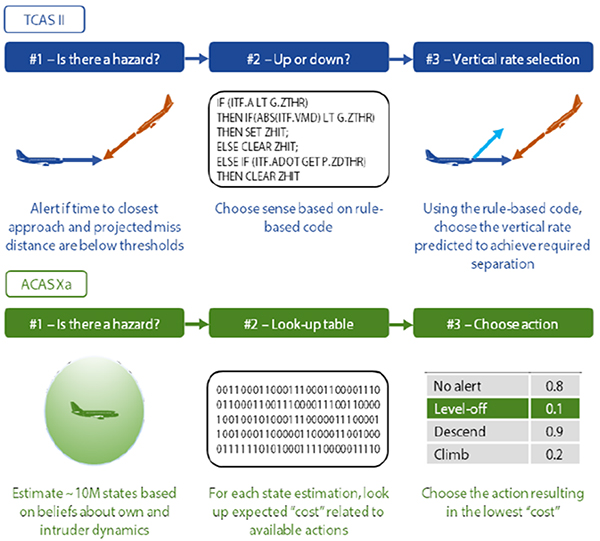
ACAS-X는 기존의 ACASⅡ를 대체하기 위한 개발 중인 표준이다. ACASⅡ가 개발될 당시에는 이용할 수 없었던 동적프로그래밍 및 컴퓨터 과학 기술의 발전으로 회피조언의 오프라인 최적화를 사용해 조언을 생성한다. 기존의 하드 코딩된 규칙을 사용하지 않고 공역의 확률적 모델(동적 모델, 센서 모델)과 실시간으로 측정되는 감시 정보를 기반으로 상태를 추정하고 최적화된 수치 조회표(Numeric Lookup Table)를 활용하여 최선의 기동을 결정한다.
ACAS-X 특징
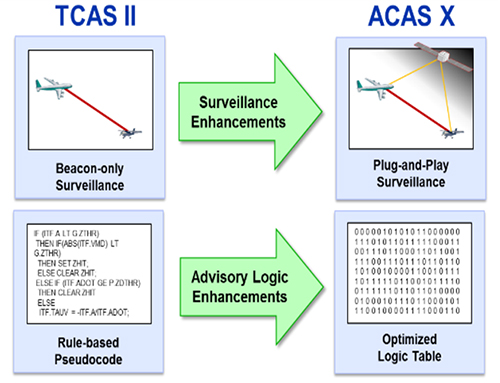
ACAS-X는 로직과 감시 분야에서 크게 향상되었다.
ACASⅡ는 항공기에 탑재된 응답기를 사용하는 질문 메커니즘에만 전적으로 의존해 침입기의 현재 위치 및 예상되는 미래 위치를 파악한다. ACAS-X의 경보 로직은 Rule/heuristics-based logic과 같은 하드코딩된 일련의 규칙을 사용하는 대신 공역의 확률 모델과 안전/운용 고려사항에 따라 최적화된 수치 조회 표(Numeric lookup table)에 기반한다. ACAS X 확률 모델은 미래 항공기 위치에 대한 통계를 제공하고, 시스템의 안전/운용 목표를 고려해 특정 절차나 공역 형상에 맞게 로직을 조정할 수 있으며 불필요한 경보를 제거할 수 있다. 이 정보는 동적프로그램이란 최적화 프로세스에 입력되어 충돌의 맥락에 따라 최선의 행동 진로를 결정한다. 여기에는 보상 대 비용 시스템을 사용해 어떤 행동이 가장 큰 편익을 생성할지 결정한다.[2]
감시분야에서는 beacon-only 방식의 감시에서 GPS를 활용하는 plug and play 방식을 통해 감시 능력이 향상되었다. Plug and play 방식은 자동 시작이라는 뜻으로 시스템이 시작하면 자동적으로 실행되는 속성을 의미한다. 최신 버전의 ACAS 7.1은 GPS를 활용하는 ADS-B(Automatic Dependant Surveillance-Broadcast) 장비로 트래픽을 추적하는 등 제한적으로 사용 중이지만 ACAS-X는 ADS-B 장비를 통해 실시간으로 정확한 정보를 수집하고 이를 바탕으로 충돌 위협을 고지하고 회피하는데 사용한다. 또한 소형 항공기나 무인기는 상당한 전력을 필요로 하는 고가의 Beacon을 장착하지 않고도 다른 항공기가 송출하는 ADS-B 정보를 사용하여 충돌을 피할 수 있다.[3]
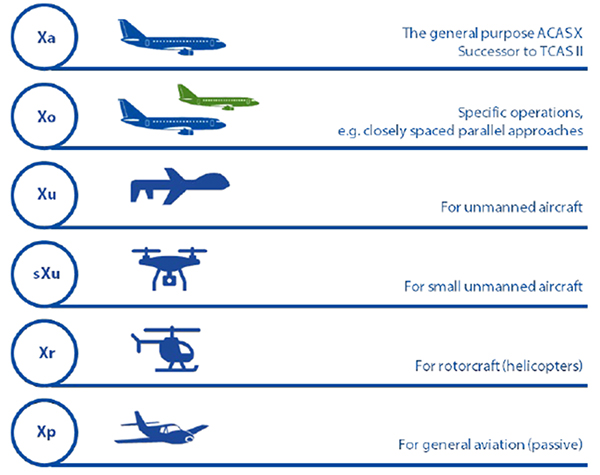
3.2 ACAS-X 파생형
ACAS-X의 장점을 활용하여 각 항공기의 목적에 맞게 개발되고 있는 ACAS-X의 파생형 표준들은 아래 표와 같다.
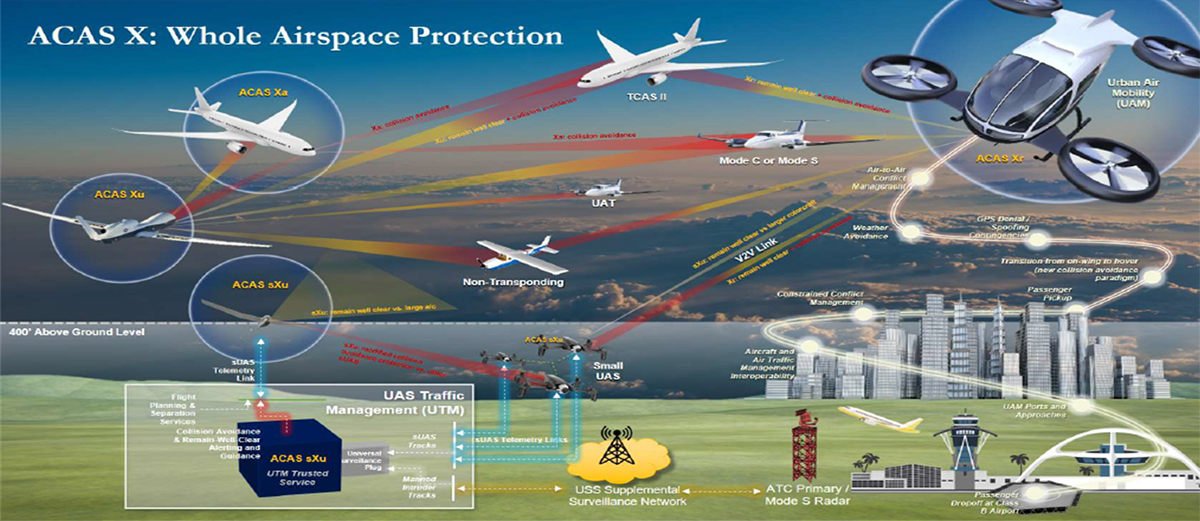
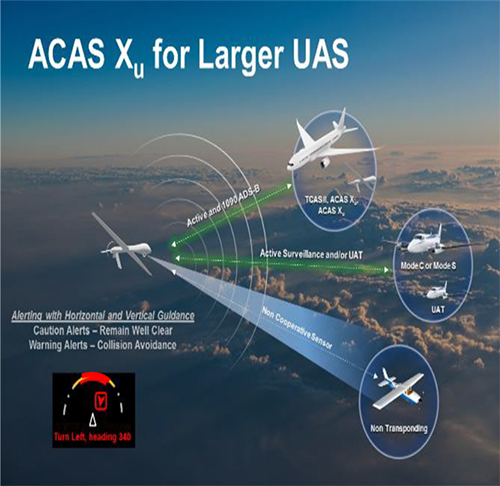
ACAS-Xu
ACAS-Xu는 ACAS-Xa/Xo의 확장 버전이며, 다양한 감시 기술 및 성능 특성을 갖춘 무인기 시스템용 표준이며, Remain well Clear(RWC) 기능과 Collision Avoidance(CA) 기능으로 구성된다. RWC 기능은 공중충돌로 발전될 가능성을 방지하기 위해 현재 비행경로를 조정함으로써 잠재적인 충돌을 피하기 위한 감지, 분석, 기동하는 능력을 말하며, 무인기가 다른 트래픽으로부터 확실한 분리가 되도록 경고와 가이드를 제공한다. CA 기능은 비행기 간의 공중충돌을 방지하기 위한 최후의 수단으로서 Collision Avoidance System(CAS)에 의해 작동되며, 다른 회피 대책이 모두 실패하였을 때 공중충돌을 방지하기 위한 경고와 가이드를 제공한다.
ACAS-Xu는 RWC 기능과 CA 기능을 모두 제공하는 DAA 솔루션이다. ACAS-Xu 최소 운영 성능 표준인 Radio Technical Commission for Aeronautics(RTCA)의 DO-386은 앞서 설명한 협조적 항공기와 비협조적 항공기 탐지, 추적 프로세스, Enroute 공역에서의 RWC와 CA 기능에 대해 설명하고 있다, ACAS-Xu는 아래와 같은 몇 가지의 특징을 다루고 있다.
첫째, 비협조적 트래픽 탐지가 가능하다. 기존의 ADS-B, Transponder와 같은 감시 소스와 Electro-optics(EO)/Infrared-radar(IR)와 같은 센서를 활용하여 비협조적 트래픽 감지가 가능하다.
둘째, 수직과 수평 회피가 가능하다. 기존 ACASⅡ의 경우 Beacon으로 측정된 고도 정보는 정확하지만, 베어링(방위) 정보는 부정확하여 수평으로만 회피가 가능하다. 또한 충돌 체적이 수직으로는 100ft, 수평으로는 500ft임으로 수직 회피가 더 짧은 거리여서 더 효율적인 대응이 가능하다. 마지막으로 항공기의 경우 수평선회보다 상승 기동이 더 빠르다. 위와 같은 이유로 수직 회피가 선호되었다. 하지만 센서를 활용해 탐지하는 비협조적 트래픽은 고도 정보가 정확하지 않기 때문에 수평 회피가 더 안전하다. 따라서 협조적 트래픽에 대해서는 수직으로 회피하고 비협조적 트래픽에 대해서는 수평회피를 하여 충돌을 방지한다.[3]
셋째, 맞춤형 위협 로직을 설정할 수 있다. 통제된 영공을 비행하는 항공기는 비슷한 성능을 가지고 있으므로 최적화된 테이블로도 충분하다. 하지만 무인기의 경우 성능이 다양하여 적절한 충돌 회피를 위해서는 각자의 성능에 맞는 최적화된 테이블이 필요하다. 이를 해결하기 위해 ACAS-Xu는 알고리즘을 조정할 수 있다.
결론
본 기고에서는 선진 항공국가에서 개발되고 있는 원격 조종 무인기용 공중충돌회피 시스템의 기능과 특징을 소개하고 관련 표준에 대해 살펴보았다. 향후 무인기의 전략화에 대비하여 신개념 공중충돌회피 기능과 관련 표준을 면밀히 분석하고 선제적으로 감항인증 기준을 마련하여 무인기 비행안전성을 확보하여야 할 것이다.
- 참고문헌
-
- 1. RTCA, Minimum Operational Performance Standards for Airborne Collision Avoidance System Xu(ACAS Xu), 2020
- 2. Eurocontrol, ACAS Guide Airborne Collision Avoidance Systems, 2022
- 3. Manfredi, G., Jestin, Y., An Introduction to ACAS Xu and the Challenges Ahead, Digital Avionics Systems Conference, 2016